力矩
力矩([1],moment[2])在物理学中,是作用力促使物體繞著轉動軸或支點轉動的趨向[3];也就是作用力使物体产生“转”、“扭”或“弯”效应的量度。簡略地说,力矩是一種施加於例如螺栓、飛輪一類的物體,或是擰毛巾、扳鋼筋的扭轉力。例如,用扳手的開口箝緊螺栓或螺帽,然後轉動扳手,這動作會產生力矩來轉動螺栓或螺帽。





使机械元件转动的力矩又称转矩(turning moment[4],moment of rotation[5])即转动力矩;在材料力学、土木工程和建筑学中,作用引起的结构或构件某一截面上的剪力所构成的力偶矩,称为扭矩[6](torsional moment,torque),而作用引起的结构或构件某一截面上的正应力所构成的力矩,则称为弯矩[7](bending moment)。
力矩能够使物体改变其旋转运动。推擠或拖拉涉及到作用力,而扭转則涉及到力矩。如上图,力矩等於径向向量与作用力的叉積。
根據国际单位制,力矩的单位是牛顿米。本物理量非能量,因此不能以焦耳(J)作單位;根據英制单位,力矩的单位则是英尺磅。力矩的表示符号是希腊字母,或。


力矩與三個物理量有關:施加的作用力、從轉軸到施力點的位移向量、兩個向量之間的夾角。力矩以向量方程式表示為

- 。

力矩的大小為
- 。

定义

力矩等於作用於杠杆的作用力乘以支点到力的垂直距离。例如,3 牛顿的作用力,施加於离支点2 米处,所产生的力矩,等於1牛顿的作用力,施加於离支点6米处,所产生的力矩。力矩是个向量。力矩的方向与它所造成的旋转运动的旋转轴同方向。力矩的方向可以用右手定則来决定。假设作用力垂直於杠杆。将右手往杠杆的旋转方向弯捲,伸直的大拇指与支点的旋转轴同直线,则大拇指指向力矩的方向[8]。
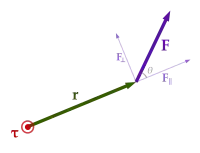


更一般地,如圖右,假設作用力施加於位置為的粒子。選擇原點為參考點,力矩以方程式定義為
- 。

力矩大小為
- ;

其中,是兩個向量與之間的夾角。
力矩大小也可以表示為
- ;

其中,是作用力對於的垂直分量。
任何與粒子的位置向量平行的作用力不會產生力矩。
從叉積的性質,可推論,力矩垂直於位置向量和作用力。力矩的方向與旋轉軸平行,由右手定則決定。
力矩與角動量之間的關係
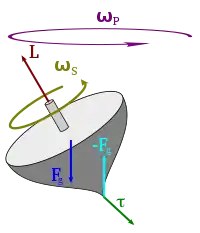

假設一個粒子的位置為,動量為。選擇原點為參考點,此粒子的角動量為
- 。

粒子的角動量對於時間的導數為
- ;

其中,是質量,是速度,是加速度。



應用牛頓第二定律,,可以得到

- 。

按照力矩的定義,,所以,
- 。


假設幾個力矩共同作用於物體,則這幾個力矩的合力矩共同決定角動量的對於時間的變化:

- 。

關於物體的繞著固定軸的旋轉運動,
- ;



所以,取上述方程式對時間的導數:
- ;

其中,是物體的角加速度。

单位
力矩的定义是距离乘以作用力。根據国际单位制,力矩的单位是牛顿米[9](Nm)。虽然牛顿与米的次序,在数学上,是可以交换的,但是国际重量测量局()规定这次序应是牛顿米,而不是米牛顿[10]。
根據国际单位制,能量与功量的单位是焦耳,定义为1牛顿米。但是,焦耳不是力矩的单位。因为,能量是力点积距离的标量;而力矩是距离叉积作用力的向量。当然,量纲相同并不尽是巧合,使1牛顿米的力矩,作用1 全转,需要恰巧焦耳的能量:

- 。

其中,是能量,是移动的角度,单位是弧度。

根據英制,力矩的单位是英尺磅。
矩臂方程式
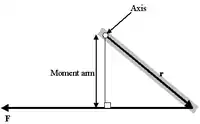
在物理学外,其他的学术界裡,力矩时常会如以下定义:
- 。

右图显示出矩臂(moment arm)、前面所提及的相对位置、作用力(force)。这个定义並没有指出力矩的方向,只有力矩的大小。所以,并不适用于三维空间问题。
静力概念
当一个物体在静态平衡时,合力是零,对任何一点的合力矩也是零。二维空间的平衡要求是
- ,
- ,
- 。




力矩、能量和功率之間的關係
假設施加作用力於一物體,使得此物體移動一段距離,則作用力對於此物體做了機械功。類似地,假設施加力矩於一物體,使得此物體旋轉一段角位移,則力矩對於此物體做了機械功。對於穿過質心的固定軸的旋轉運動,以數學方程式表達,
- ;

其中,是機械功,、分別是初始角和終結角,是無窮小角位移元素。




根據功能定理,也代表物體的旋轉動能的改變,以方程式表達,

- 。

功率是單位時間內所做的機械功。對於旋轉運動,功率以方程式表達為

- 。

請注意,力矩注入的功率只跟瞬時角速度有關,而角速度是否在增加中,或在減小中,或保持不變,功率都與這些狀況無關。
實際上,在與大型輸電網路相連接的發電廠裏,可以觀察到這關係。發電廠的發電機的角速度是由輸電網路的頻率設定,而發電廠的功率輸出是由作用於發電機轉動軸的力矩所決定。
在計算功率時,必須使用一致的單位。採用國際單位制,功率的單位是瓦特,力矩的單位是牛頓-米,角速度的單位是每秒弧度(不是每分鐘轉速rpm,也不是每秒鐘轉速)。

参考文献
- https://terms.naer.edu.tw/detail/09e3fa45b1d9fac0d25d6a44e794f576/?seq=2
- . [2023-05-19]. (原始内容存档于2023-05-19).
- Serway, R. A. and Jewett, Jr. J. W. (2003). Physics for Scientists and Engineers. 6th Ed. Brooks Cole. ISBN 978-0-534-40842-8.
- . [2023-05-19]. (原始内容存档于2023-05-19).
- . [2023-05-19]. (原始内容存档于2023-05-19).
- . [2023-05-19]. (原始内容存档于2023-05-19).
- . [2023-05-19]. (原始内容存档于2023-05-19).
- , Bureau International des Poids et Mesures, 2006 [2007-04-01], (原始内容存档于2007-05-19)
- , Bureau International des Poids et Mesures, 2006 [2007-04-01], (原始内容存档于2005-03-16)
- Engineering Mechanics: Equilibrium, by C. Hartsuijker, J. W. Welleman, page 64
外部链接
- 模擬力矩平衡的Java小程式(页面存档备份,存于)
- Torque and Angular Momentum in Circular Motion (页面存档备份,存于) on Project PHYSNET(页面存档备份,存于).
- Torque Unit Converter(页面存档备份,存于)