锚钩固定装置
锚钩固定装置主要用于航天器或其他物体,为机械臂提供安全连接。
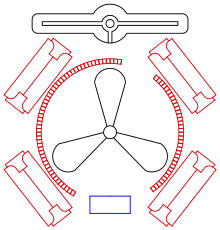
黑色装置与 SSRMS、SRMS 和 JEMRMS 兼容。蓝色装置与 SRMS 和 JEMRMS 兼容。红色装置与 SSRMS 兼容。
北美
这些固定装置使航天飞机的加拿大臂(SRMS)能够安全地抓住大型物体(例如国际空间站组件或卫星,例如哈勃空间望远镜)。
该装置目前与国际空间站的空间站移动维修系统(SSRMS)和希望号实验舱远程操纵器系统(JEMRMS)做同一用途。 [1]
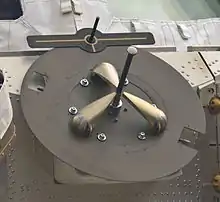
锚钩固定装置外观扁平,中央锚钩顶部有一个球体,机械臂末端的圈套可锁定在该球体上。他们使用三个“坡道”帮助机械臂正确引导到锚钩夹具上。 [2]
发展
北美的锚钩固定装置是在20世纪70年代由Spar Aerospace开发的。它由 Frank Mee 发明,他还为航天飞机发明了加拿大臂末端执行器。 [3] 之后,由Barrie Teb 进一步完善了这种固定装置的设计。 [3]
飞行器可释放型锚钩固定装置
飞行可释放抓斗夹具
飞行器可释放型锚钩固定装置 (FRGF) 是北美锚钩固定装置最简单的一种变种,它只能进行抓取动作,而没有任何电连接器。 [4]它们在早期的航天飞机被中使用,是由标准飞行锚钩固定装置 (FSGF) 发展而来,其允许在舱外活动(EVA) 期间安装锚钩。 [5]
SpaceX 龙飞船、 Orbital ATK 天鵝座宇宙飛船和日本HTV货运飞船等无人驾驶飞船都使用了FRGF,国际空间站上的加拿大臂2会使用这一装置对抵达国际空间站的飞船进行停泊。 [6]该夹具的最大额定载荷为 65,000 磅或 30,000 公斤。 [7]轨道替换装置也可能有一个锚钩固定装置。
参考来源
- http://iss.jaxa.jp/en/htv/mission/htv-1/presskit/htv-1_presskit.pdf (页面存档备份,存于) pg19
- CanadaArm2 End Effector 的存檔,存档日期2012-10-05.
- Dotto, Lydia. . David Steel. Canada: Spar Aerospace Limited. 1992: 42–43 [2022-06-14]. ISBN 0-9696618-0-0. (原始内容存档于2022-06-14).
- Callen, Phillip. (PDF). NASA. June 2014 [23 November 2015]. (原始内容 (PDF)存档于2022-06-14).
- . Spar Aerospace. 1983 [23 November 2015]. (原始内容存档于2015-11-23).
- Space station catches Dragon by the tail
- . American Institute of Aeronautics and Astronautics. 1994: 460 [2022-06-14]. (原始内容存档于2022-06-14).
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.