基點
基點(英語:)是高斯光學中位於旋轉對稱的焦点光学系统的光轴上的三对点,它们分别是焦點 、主點和节点[1]。在理想光学系統,圖像大小、位置和方向等基本成像屬性完全由基點的位置決定;事實上,只需要四點:焦點和主要或頂點。在實踐中可以實現的唯一理想光学系統是平面鏡[2]。然而,基點被廣泛用於近似真實光學系統的行為。基點提供了一種分析簡化具有許多元件系統的方法,允許通過簡單的計算近似地確定系統的成像特性。
解釋
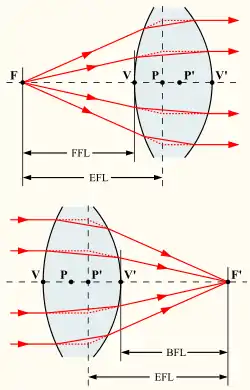
F, F'是前後焦點,
P,P' 是前後主點,
V,V'是前後表面頂點。
基點位於光學系統的光軸上。在近軸近似中,每個點都由對通過該光學系統的射線影響來定義。對軸近似假設光線相對於光軸以淺角度行進,因此
and [3]。


孔徑效應被忽略:在下面的討論中,不考慮不通過系統孔徑光圈的光線。
焦點和焦平面
根據定義,光學系統的前「焦點」具有這樣的性質:任何穿過它的光線都會從平行於光軸的系統中出來。系統的實(或後)焦點具有相反的性質:平行於光軸進入系統的光線經過聚焦,從而穿過後焦點。
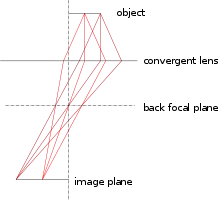
前和實(或後)「焦平面」定義為垂直於光軸的平面,其穿過前和後焦點。離光學系統無限遠的物體在後焦平面形成一個圖像。對於距離有限的物體,影像是在不同的位置形成的,但使物體彼此平行的光線在後焦平面交叉。
後焦平面上的膜片或"停止"可用於按角度過濾光線,因為:
- 它只允許以足够小的角度(相對於光軸)發射的光線通過。(無限小的光圈只允許沿光軸發射的光線通過。)
- 無論光線來自物體的哪個位置,只要從物體發射的角度足夠小,光線就會穿過光圈。
請注意,光圈必須位於光軸的中心,這樣才能如圖所示工作。在焦平面上使用足够小的孔徑將使透鏡偏心。
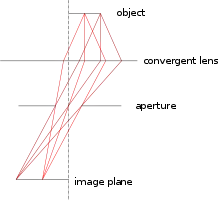
同樣的,可以通過在透鏡的前焦平面(或整個透鏡內的透鏡組)放置一個光圈來過濾透鏡輸出側允許的角度範圍。這對於配備CCD感測器DSLR相機非常重要。這些感測器中的像數對直接照射到它們的光線比對以一定角度照射的光線更敏感。不控制探測器入射角的鏡頭將在影像中產生像素暈影。
主平面和主點
這兩個主平面具有這樣的特性:從透鏡出來的光線似乎已經穿過後主平面,距離軸的距離與從透鏡前面看,與光線似乎穿過前主平面的距離相同。這意味著可以把透鏡看作所有折射都發生在主平面上,從一個主平面到另一個主平面的線性放大倍率為+1。主平面對於定義系統的光學特性至關重要,因為物體和影像與前後主平面的距離决定了系統的放大率。“主點”是主平面與光軸相交的點。
如果光學系統周圍的介質的折射率為1(例如,空氣或真空),則從主平面到其相應焦點的距離只是系統的焦距。在更一般的情况下,到焦點的距離是焦距乘以介質的折射率。
對於空氣中的薄透鏡,主平面都位於透鏡的位置。它們穿過光軸的點有時被誤導性地稱為透鏡的「光學中心」。但是,請注意,對於真實的鏡頭,主平面不一定穿過透鏡的中心,並且通常可能根本不位於鏡頭內部。
节点
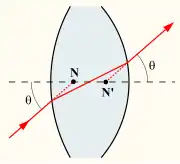
前节点和後节点具有這樣的特性:瞄準其中一個节点的光線將被透鏡折射,使得它看起來像是來自另一個节点,並且相對於光軸有相同的角度(兩节点之間的角放大倍率為 +1。)。因此,节点對角度的作用與主平面對橫向距離的作用相同。如果光學系統兩側的介質相同(通常是空氣),則前後节点分別與前後主點重合。
1845年,約翰·李斯特(Johann Listing)首次描述了节点,以評估眼睛,其中圖像是在流體中形成的。隨著時間的推移,人們發現,如果在遠處物體的視角下,通過晶狀體的後頂點畫一條線,那麼它將指向視網膜上的影像位置,即使對於非常大的角度也是如此[4][5]。這條線大約穿過第二個节点。這可以用來確定放大倍數,或量測視網膜位置。眼睛的高度彎曲結構會對通過节点的光線產生線性角度縮放,即使在近軸近似不成立且节点通常不相關的角度。
节点在攝影中被廣泛誤解,通常認為光線在节点處"相交",鏡頭的虹膜光膈膜位於此處,這是全景攝影的正確樞軸點,以避免視差的誤差[6][7][8]。這些說法通常源於對相機鏡頭光學的混淆,以及系統的节点和其它基點之間的混淆。(對於旋轉相機進行全景攝影點的更好選擇可以顯示為系統入射光瞳的中心[6][7][8]。另一方面,具有固定膠片位置的擺動鏡頭相機圍繞後节点旋轉鏡頭,以穩定膠片上的影像[8][9]。)
將光學系統建模為數學變換
在幾何光學中,對於每個進入光學系統的射線,都會出現(對應)一條唯一的光線。用數學術語來說,光學系統執行轉換,將每個物體射線映射到一條影像射線[1]。物體射線及其相關的影像射線被稱為相互共軛。這個術語也適用於相應的對象和影像點和平面對。物體和影像射線和點被認為位於兩個不同的光學空間中,即物體空間和影像空間;也可以使用額外的中間光學空間。
旋轉對稱光學系統;光軸、軸向點和子午平面
如果光學系統的成像特性通過圍繞某個軸的任意旋轉而保持不變,則該光學系統是旋轉對稱的。這個(唯一的)旋轉對稱軸是系統的光軸。光學系統可以使用平面鏡摺疊; 如果系統在展開時具有旋轉對稱性,則仍被認為是旋轉對稱的。光軸上的任何點(在任何空間中)都是「軸向點」。
旋轉對稱性大大簡化了光學系統的分析,否則必須進行三維分析。旋轉對稱允許通過僅考慮限制在包含光軸的單個橫向平面上的光線來分析系統。這樣的平面被稱為「子午平面」;它是通過系統的橫截面。
理想旋轉對稱光學成像系統
一個「理想」的旋轉對稱光學成像系統必須滿足三個標準:
- "任何「起源」於物體的所有光線都會聚到一個影像點(成像為「無像散」)。
- 垂直於光軸的物體平面是共軛圖像平面與垂直於該軸的像平面。
- 限制在垂直於軸的平面上的物件影像在幾何上與該物件相似。
在某些光學系統中,成像對於一個或幾個目標點是無像散的,但要成為理想的系統成像,必須對每個目標點無像散。
與數學中的直線不同,光線在兩個方向上都會無限延伸到無窮遠。當光線位於其應用的光學系統部分時,它們是真實的,而在其他地方則是虛擬的。例如,物體光線在光學系統的物體一側是真實的。在無像散成像中,與物體空間中任何特定點相交的物體光線必須與與影像空間中共軛點相交的影像光線共軛。結果是,物體射線上的每個點都與共軛成像射線上的某個點共軛。
幾何相似性意味著影像是物體的比例模型。對影像的方向沒有限制。影像可以反轉或以其它方式相對於物件旋轉。
聚焦和非聚焦系統,焦點
在無焦系統中,平行於光軸的物體光線與平行於光軸的圖像光線共軛。這類系統沒有焦點(因此稱為無焦),也缺乏主點和节点。如果平行於光軸的物體光線與與光軸相交的成像光線共軛,則系統是聚焦的。影像射線與光軸的交點是影像空間中的焦點F'。聚焦系統也有一個軸向點F,使得通過F的任何光線都與平行於光軸的成像光線共軛。F是系統的物體空間焦點。
轉換
物體空間和影像空間之間的轉換完全由系統的基點定義,這些基點可用於將物體上的任何點映射到其共軛影像點。
相關條目
- 膠片平面
- 針孔相機
- 曲率半徑 (光學)
- 收斂 (光學)
註解和參考資料
- Greivenkamp, John E. . SPIE Field Guides vol. FG01. SPIE. 2004: 5–20. ISBN 0-8194-5294-7.
- Welford, W.T. . CRC. 1986. ISBN 0-85274-564-8.
- Hecht, Eugene. 4th. Addison Wesley. 2002: 155. ISBN 0-321-18878-0.
- Simpson, MJ. . Applied Optics. 2022, 61 (10): 2797–2804. PMID 35471355. S2CID 247300377. doi:10.1364/AO.455464.
- Simpson, MJ. . Photonics. 2021, 8 (7): 284. doi:10.3390/photonics8070284
 .
. - Kerr, Douglas A. (PDF). The Pumpkin. 2005 [2006-03-05]. (原始内容 (PDF)存档于2006-05-13).
- van Walree, Paul. . [2007-01-01]. (原始内容存档于2015-04-19). Item #6.
- Littlefield, Rik. (PDF). ver. 1.0. 2006-02-06 [2007-01-14]. (原始内容存档 (PDF)于2008-12-27).
- Searle, G.F.C. 1912 Revolving Table Method of Measuring Focal Lengths of Optical Systems in "Proceedings of the Optical Convention 1912" pp. 168–171.
- Gray, Henry. : 1019. 1918 [2009-02-12]. (原始内容存档于2009-02-06).
- Hecht, Eugene. 2nd. Addison Wesley. 1987. ISBN 0-201-11609-X.
- Lambda Research Corporation. (PDF) Version 6.1. 2001 [2006-03-05]. (原始内容存档 (PDF)于2012-02-04). Pages 74–76 define the cardinal points.
外部連結
- Learn to use TEM (页面存档备份,存于)